
Airborne Inertial-SLAM
Simultaneous Localisation And Mapping (SLAM) was first addressed in the seminal paper by Smith and Cheeseman and has evolved from the indoor robotics to outdoor andunderwater areas. The airbone application imposes further challenges due to the high-dynamics, limited field of view, and limited features. The key element for its success is on an reliable odometry system between landmark aiding periods. The full 6DoF inertial navigation system is required for continuous and full-state information. The problem is any INS system based on a low-cost IMU has very poor navigation performance without any aiding signals, and the IMU should be calibrated on-the-fly through the estimation. There are lots of research activies on the aided INS system, particularly using GNSS (Global Navigation Satellite System) (check ION meeting if you're interested).
Inertial system without relying on GNSS signal is an open challenge area, and inertial-SLAM is one of the most potential approaches. The dominant sensors used are vision/laser which are self-contained signals. There are various active research groups around the world in this area:
Structure of Airborne SLAMThe overall structure of SLAM is about building a relative map of landmarks using relative observations, defining a map, and using this map to localise the vehicle simultaneously. Traditionally, there has been a bacon-aided navigation with known beacon position, or aerial mapping with known navigation solution. Airborns SLAM is thus unifying these two methods significantly enhancing the survability of the UAVs in unknown terrain environments. |
 |
Airborne SLAM Results on a real-UAV flight
| |
The vehicle and landmark positions estimated from the real-time SLAM
system. The GNSS/Inertial position and surveyed landmark positions are plotted for
comparison, showing the correspondences with the ground truths. |
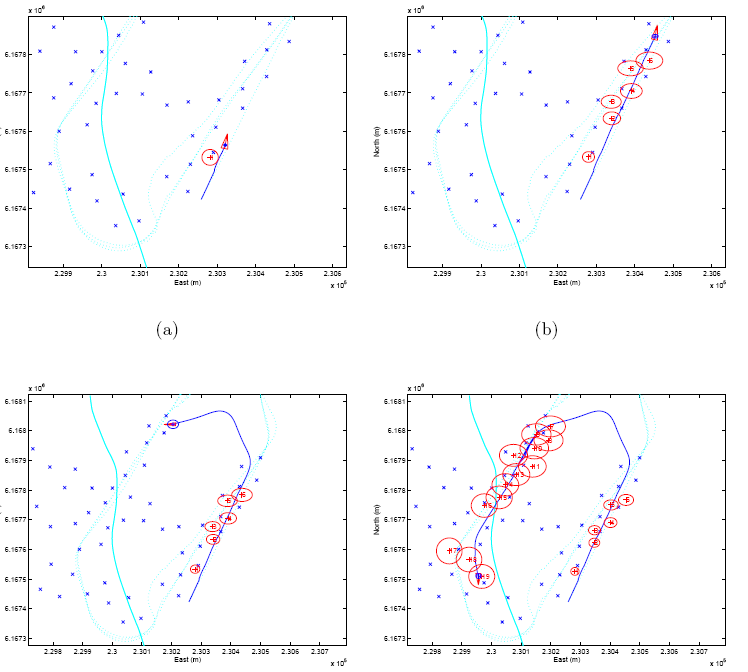 |
The detailed views of real-time SLAM during the first round. (a) The SLAM system was activated during the flight. (b),(c) and (d) present the incremental building up of the map and used it to estimate inertial errors simultaneously (5σ ellipses were plotted for the landmark). |
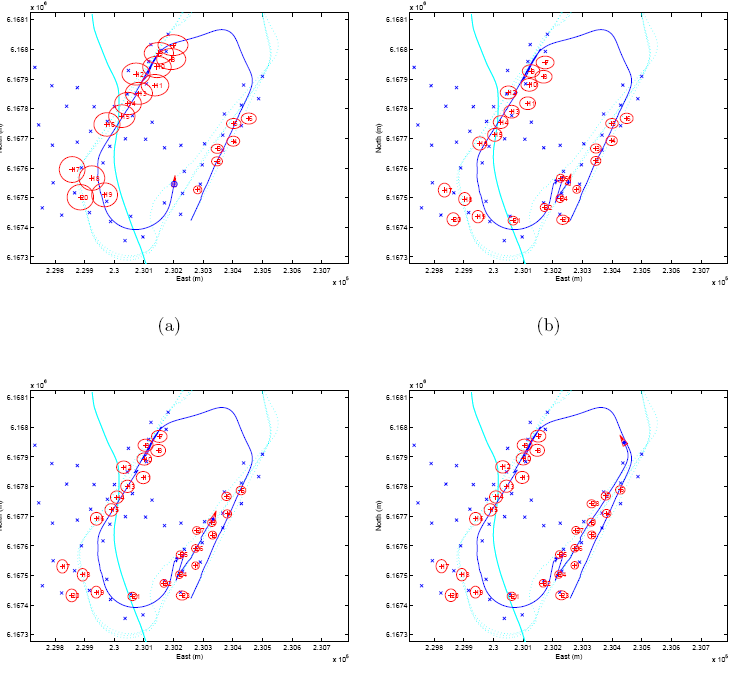 |
The detailed views of real-time SLAM during the round. (a) The vehicle re-approaches the initial position and (b) the loop is closed by observing earlier landmarks. The map accuracy improved and along with the vehicle’s states. (c) and (d) show accuracy improvements for successive re-observations of landmarks within the round. |

Related Publications
- Kim J., and Sukkarieh S., “Real-time Implementation of Airborne Inertial-SLAM,” Robotics and Autonomous Systems, Issues 55, Pages 62–71, 2007
- Kim J. and Sukkarieh S., “Autonomous Airborne Navigation in Unknown Terrain Environments.” IEEE Transactions on Aerospace and Electronic Systems, Vol. 40, No. 3, pp. 1031-1045, July 2004.
So what's going on in this area?
There have been significant progresses in Bayesian SLAM (Simultaneous Localisation and Mapping) in mobile robot applications. However its application with inertial system, which is crucial in flying robots, still suffers difficulties due to non-linearity and high dimensionality in challeging flying environements. It has been shown that the Rao-blackwellizated particle filter can efficiently reduced the number of particles in SLAM problem and it can further be utilized in the inertial SLAM tackling non-linearity in attitude dynamics, while handling linear parts with Kalman filtering.
Rao-Blackwellised Filtering
Direct application of particle ¯ltering for a high dimensional system is not computationally tractable and thus not desirable. Rao-Blackwellised (R-B) ¯lter however, provides a effective means to reduce the sample-space by factorising the full density and by applying the particle ¯ltering only for the reduced subspace.
 |
 |
|
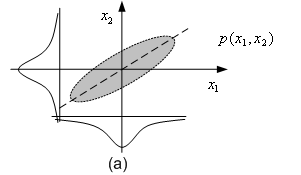
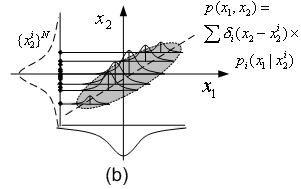
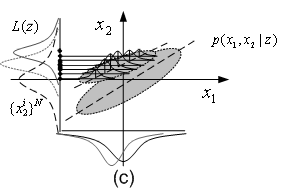
R-B particle filtering for a 2 dimensional state
system: a) a full joint PDF. b) one of its subspaces (x2)
is approximated by a set of particles each of which carries
a conditional PDF of x1. c) With an observation on x2,
the particles are re-located, subsequently changing the
full joint and marginal PDFs. |
||
Rao-Blackwellised Inertial-SLAM
The idea is to separate the high-dimensional INS states into two sub-states: an external pose state xe which is related to the mapping, and an internal states xi for navigation and inertial sensor calibration.
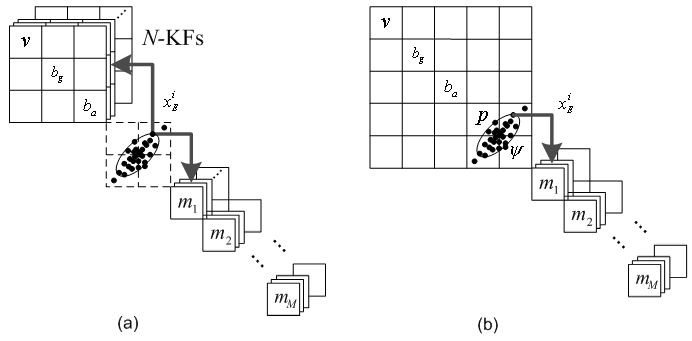 (a) R-B Inertial-SLAM effectively removes the map-to-map correlations but not those between the internal states. (b) Hybrid R-B Inertial-SLAM, however, maintains only one vehicle EKF, while utilising pose particles reducing the computational complexity. |
Related Publications
- Euston, M and Kim, J., “Rao-Blackwellised Inertial-SLAM with Partitioned Vehicle Subspace,” Australasian Conference on Robotics and Automation (ACRA’07), Brisbane, Australian, Dec 10-12, 20076. [submitted]