Local Background Enclosure for RGB-D Salient Object Detection
David Feng, Nick Barnes, Shaodi You, Chris McCarthy
Abstract
Recent work in salient object detection has considered the incorporation of depth cues from RGB-D images. In most cases, depth contrast is used as the main feature. However, areas of high contrast in background regions cause false positives for such methods, as the background frequently contains regions that are highly variable in depth. Here, we propose a novel RGB-D saliency feature. Local Background Enclosure (LBE) captures the spread of angular directions which are background with respect to the candidate region and the object that it is part of. We show that the LBE feature gives at least a 10% improvement in performance compared to depth contrast features on the RGBD1000 and NJUDS2000 datasets. Embedding the LBE feature into a standard saliency approach incorporating priors and Grabcut refinement results in improved performance over state-of-the-art RGB-D saliency systems as well as RGB methods on these datasets.
Download links for the [conference paper], [supplementary material], [slides], and [poster].
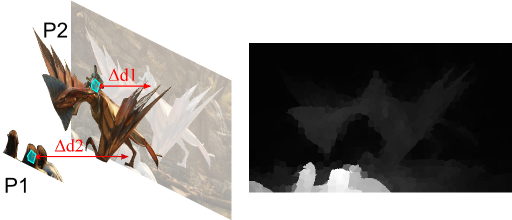
Figure 1. Depth contrast features assign saliency according to the depth difference between a patch and its surroundings. This results in errors in identifying foreground as seen in the contrast-based saliency map (right).
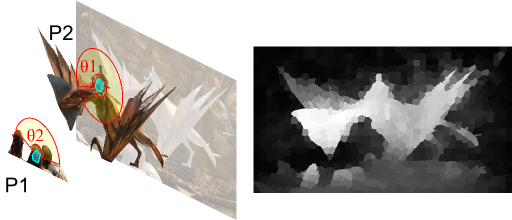
Figure 2. Local Background Enclosure measures the spread of directions around a patch where it is in front of its surroundings. The salient object in this example is correctly identified in the Local Background Enclosure saliency map (right).
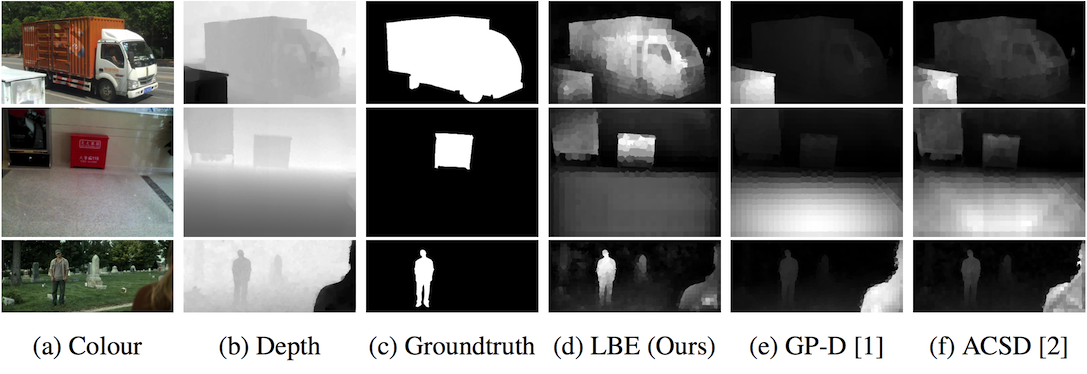
Figure 3. Comparison of saliency maps generated from different depth features. Local Background Enclosure (d) gives improved results compared to the contrast based depth features (e) [1] (f) [2] used in state-of-the-art salient object detection systems.
Download Code for computing Local Background Enclosure
The code for computing the compute Local Background Enclosure (LBE) depth feature is made freely available to the scientific community. Any publications resulting from the use of this code should cite the following paper:
- D Feng, N Barnes, S You and C McCarthy. Local background enclosure for RGB-D salient object detection. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016.
[Click here] to download the C++ code for computing the Local Background Enclosure depth feature. The README.txt and license are contained in the root directory.
Download Precomputed Saliency Maps
The output of our salient object detection system is available on two datasets.
References
- R Ju, L Ge, W Geng, T Ren, and G Wu. Depth saliency based on anisotropic center-surround difference. IEEE International Conference on Image Processing (ICIP), 2014.
- J Ren, X Gong, L Yu, W Zhou, and M Y Yang. Exploiting global priors for RGB-D saliency detection. IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 2015.