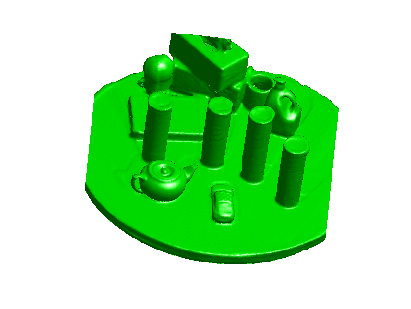
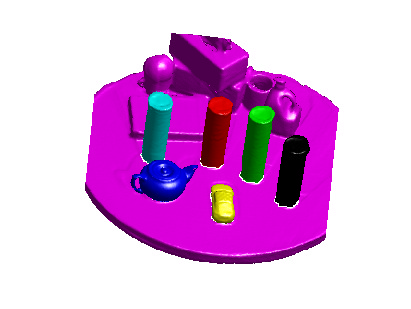
Automatic Segmentation of a KinectFusion 3D reconstruction into Objects (2015)
Truncated Signed Distance Function (TSDF) based 3D reconstructions of static environments can be readily captured using KinectFusion. This work focuses on segmenting such a reconstruction into objects based on any motions observed in the scene. The work facilitates objects to be continuously updated while they are on move. See our WACV 2015 paper for details.
Dense Motion Segmentation with Kinect

Darboux frame based Motion Estimation and Segmentation with Kinect (2013)
There are certain points in a scene with special surface characteristics; characteristics that allow attaching a unique 3D orientation frame to each surface point. For example, in case of a cylindrical surface, by physically touching or visually observing, we know that along one specific direction the surface is flat (parallel to the axis of the cylinder) and hence take note of the orientation of the surface. The implication of such an orientation frame at each surface point means any rotation of the surfaces over time can be determined simply by considering the change in the corresponding orientation frames. Based on this idea we propose a single point motion estimation (rotation and translation) approach and apply it to solve the motion segmentation problem. The work was presented at DICTA 2013.
Visual Odometry (2011)
Demonstration of stereo camera based egomotion estimation in vehicle navigation.
Visual Simultaneous Localization And Mapping (Visual SLAM) (2011)
This is about building a 3D map of the environment using a moving camera. The motion of the camera is also recovered. A real-time system was implemented using C++ (OpenCV, VTK) and a FireWire camera. The work was presented at ISVC 2011.