|
Humans have the ability to abstract a "high-level" symbolic
representation (concepts) of the dynamics in their surrounding
world. This seems to be the key to the impressive cognitive abilities
they display. Concepts (eg. such as "chair") allow humans to make
intelligent decisions about how to act or what to expect even if they
have never experienced the particular chair currently in their
presence.
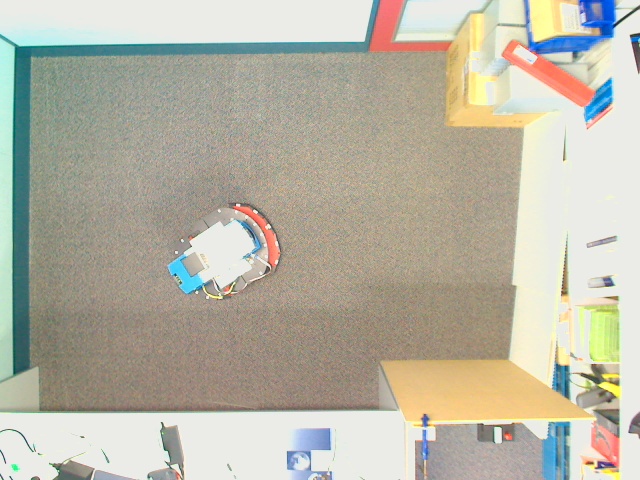
Historically, AI has evolved into two distinct approaches for installing such concepts into AI agents. First, the Top-Down approach of Logic and Machine Learning. Here, symbols representing concepts are installed in an agent by the system designer. The criticism then is that, even though the symbols mean something to the designer, they do not mean anything to the agent itself, since they are not grounded in its sensory and actuatory experience of the environment (see Harnard 1990 for example). The other approach historically taken to AI is the Bottom-up approach of neural networks (connectionism). The aim here is to achieve high-level cognition by connecting simple neuronal (ie non-symbolic) elements into networks. It was hoped that a symbolic (conceptual) representation of the environment would emerge out of these networks, however it has not occurred to date. We call this the BUNS (Bottom Up Non-Symbolic) approach to AI due to the non-symbolic nature of neurons. A third possible approach to AI is to grow concepts in a bottom up fashion but not restrict the substrate to be non-symbolic (ie neuronal). We call this the Bottom Up Symbolic (BUS) approach. A small body of work using this method exists in the literature (eg. Rosenstein and Cohen AAAI 99 and Pierce and Kuipers AI 92, plus others - see my IAT'09 paper). These works do not include real world and random agent exploration in their concept formation process, while we do (see further discussion in my IAT'09 paper). The result is that the concept formation process in our work requires a statistical basis, which is what distinguishes it from the others. |

|
| Clustering of Time Series was a widely used technique in the Data Mining Community and beyond until the discovery by Keogh et. al. in 2003 that it is meaningless. In 2005 I proposed a method to overcome the dilemma (see ICDM'05 and KAIS'07 publications) for a restricted set of time series based on constructing an alternative (to the usual Euclidean Distance) metric for measuring dissimilarity in the clustering space. In 2007 I generalised this result by proposing a method that results in both meaningful and useful clustering outcomes for general time series (see AUSDM'07 paper). I was invited to write a chapter surveying the Subsequence Time Series Clustering field in The Encyclopedia of Data Warehousing and Mining (2nd Edition). See the article here . |
|
|

|
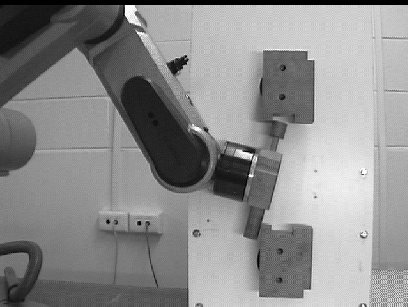
| One of the key things impeding the wider spread of robots into the general community is the issue of programming. The average person is not usually technically proficient enough to program a robot using current methods (writing code). However these people often have the greatest need for robotic help (e.g. senior citizens). The idea behind Programming by Demonstration is to have humans "show", or demonstrate, how to do the task they want done. This is a very natural programming method for humans, and is often how human-to-human skill transfer occurs. The key research issue in PbD is to create an interface that takes, as input, the demonstration, and outputs control commands for the robot. Quite a bit of work looking into PbD interfaces exists in the literature. These range quite a lot in the sensor suits used to interpret the demonstration, and on the target robot mechanism used. My work in the area culminated in two papers in the International Journal of Robotics Reseach (2003 and 2005). One of the key distinctions of my work compared to others was an interface which interpreted the demonstration at a higher, "conceptual" level, rather than just attempting to copy the low level control commands (e.g. movements or manipulations) demonstrated by the human. Shown is a robot inserting a paper roll holder between two supports after being programmed using PbD. |
|

|
I am currently teaching Systems Dynamics Engn2221. For the web page for this course, go to the wattle web site
Here are links to other courses I've taught
|

