Design of the Sydney submersible
Mechanical
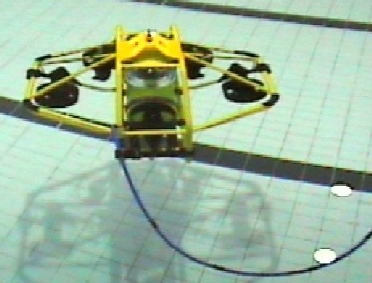
Images of Oberon: front,
side,
top,
and three-quarter
Electrical
Motors
Oberon's thruster motors are Minnkota Classic 35 electric fishing motors.
The motors have thrust profiles which require a certain amount of current to get them started and cause cavitation before the maximum current is reached.
[Table of forward thrust values]
[Table of reverse thrust values]
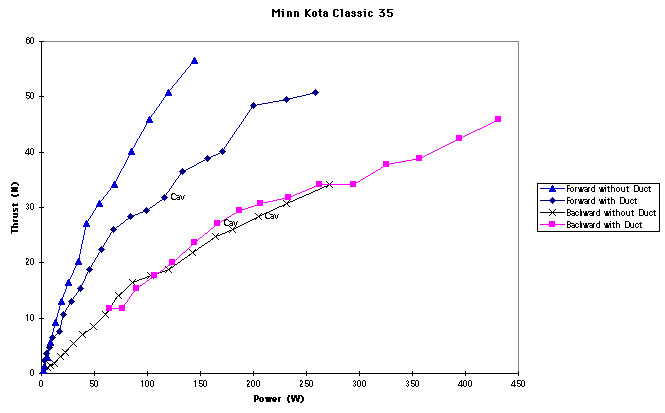
On Oberon the motors are run at an average of 12 volts with a maximum current of 10 amperes. The motor itself will take up to 30 amperes. (But remember it is designed to propel a 1500+lb fishing boat.)
Power
The shore power system schematic and circuit diagram.
The submersible power circuit diagram.
Computing
Oberon is built on a transputer architecture. Motion control is open loop based on a model of motor thrust.
Sensing
Oberon carries a sophisticated inertial package and a sonar that provides a map view of the environment.
Imaging
Oberon carries a Pulnix black & white camera mounted on a Directed Perception pan/tilt device.
By David
Wettergreen, <dsw@syseng.anu.edu.au>
Last modified:
![[Table of forward thrust values]](images/oberon/thrust_forward.jpg){kind=link}
![[Table of reverse thrust values]](images/oberon/thrust_reverse.jpg){kind=link}
{kind=link}