Human Face Tracking
Our basic idea to overcome the problem of temporarily distorted or
occluded features is to have individual search windows help each other
to track their features.
Since the geometric relationship between the features in a face is
known a lost search window can be relocated by assistance from those
that are still tracking.
In a first approach a two dimensional model of the face is used where
the features are placed on a virtual grid.
During face tracking the search windows can monitor their relative
position to the other windows and readjust their coordinates if
necessary.
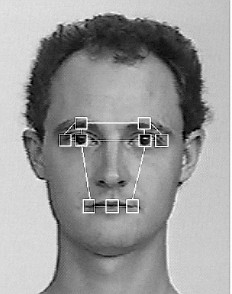
The figure shows the face of a person where the
boxes mark the 9 features that are used for tracking.
The lines indicate the connections between the search windows.
The robustness of the tracker heavily depends on the method used to
fuse the tracking results of the vision system with the geometric data
derived from the 2D face model.
In difficult situations, when the head is turned and all the templates
match with high distortions, it is not possible to determine whether
or not a feature has been lost based on the distortion reported by the
vision system.
Thus, a probabilistic approach must be chosen to merge the uncertain
tracking data with the information derived from the 2D facial model.
We believe that Kalman filters are an appropriate method to cope with
this problem.
The following pictures show results from the face tracking.
The estimated positions of the features is marked with small white crosses.
Feedback & Queries: Jochen Heinzmann
Date Last Modified: Thursday, 24th Oct 1997