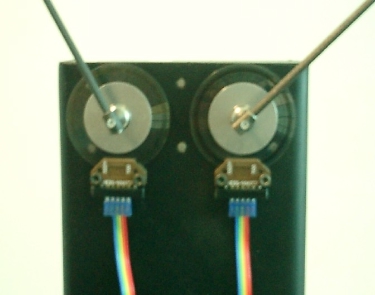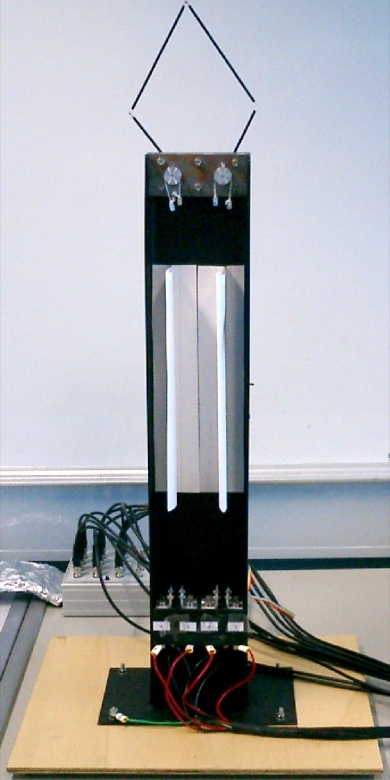
This picture shows the complete pantograph robot, and there are two close-up pictures below showing some of the details. This device is a test rig for our experiments into fast, accurate motion control of SMA actuators. It features:
- two antagonistic pairs of 0.1 mm SMA (Flexinol) wires, each pair operating a drive shaft via a pulley;
- a lightweight pantograph mechanism made from carbon tubes, which serves as a coupled, nonlinear dynamic load for the two actuator pairs to try and control; and
- high-resolution optical shaft encoders for accurate measurement of drive-shaft motions.
We have used this system to test a new rapid-heating algorithm that doubles the speed of the wires, and we have implemented several different control laws in an effort to find one that produces highly accurate motion.
Here is a movie (10MB) of one of our earlier attempts, which used a relay controller and a phase-lead compensator. It makes the pantograph tip trace a small square at 1 Hz. The speed is very good, but the accuracy needs improvement.
We have since implemented a modified proportional controller, which is much more accurate.